Сотрудники управления по научной деятельности заняли первые места с проектами в области робототехники.

В конце мая в Москве прошла конференция ICMSC 2016, на которой учёные из различных областей робототехники презентовали собственные проекты и обсуждали перспективные технологии с коллегами из Великобритании, Кореи, Китая и других прогрессивных стран.
В работе конференции участвовали и сотрудники управления по научной деятельности Университета Иннополис — Александр Климчик, Рамиль Хусаинов и Илья Шимчик. По итогам 3 дней работы члены технического комитета форума присудили им победу в трёх из шести номинаций «Лучшая презентация». Отметим, что работы представителей Университета Иннополис опубликуют в томе журнала MATEC Web of Conferences, который индексируется Ei Compendex, Inspec, DOAJ, CPCI (Web of Science) и Scopus.
Мы собрали информацию о проектах, чтобы ближе познакомить вас с одним из самых перспективных направлений современной науки.
Роботы и производство
Первую работу из Университета Иннополис, которая получила награду конференции, представил Александр Климчик, доцент Университета Иннополис. Его проект «Жесткость серийных и квази-серийный манипуляторов: сравнительный анализ» раскрывает вопросы различия жесткости промышленных роботов-манипуляторов под воздействием внешних нагрузок, которые вызваны процессом механообработки.
«Тема работы заинтересовала меня более года назад, когда мы с коллегами в ходе экспериментов выяснили, что роботы с кинематическими параллелограммами при большей податливости приводов способны обеспечить ту же точность, что и последовательные роботы с жёсткостью на порядок выше. После чего нам захотелось разобраться, в чём причина и где кроются подводные камни», — объясняет Александр Климчик.
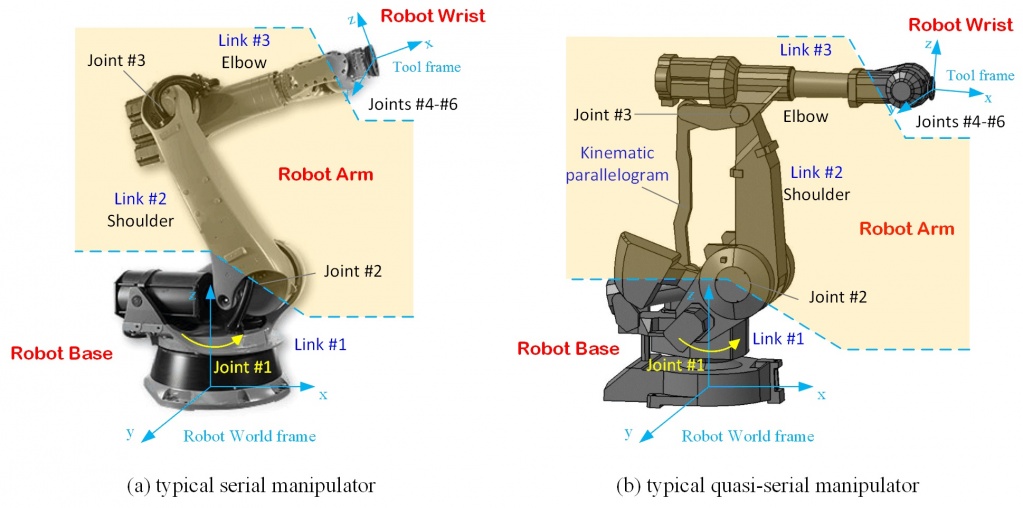 2 типовые архитектуры промышленных роботов: классический робот с последовательной архитектурой и робот с кинематическим параллелограммом. На изображении показано, что основное различие между архитектурами связано с манипулятором, который управляет положением кисти. Кисть робота и его ориентация задаются идентично для обеих архитектур.
2 типовые архитектуры промышленных роботов: классический робот с последовательной архитектурой и робот с кинематическим параллелограммом. На изображении показано, что основное различие между архитектурами связано с манипулятором, который управляет положением кисти. Кисть робота и его ориентация задаются идентично для обеих архитектур.
В рамках работы над проектом учёные проделали объёмную роботу по моделированию разных роботов, из которой следует, что полученные экспериментальные результаты справедливы для общего случая. Работа позволила систематизировать преимущества и недостатки обеих кинематических схем. Рабочая группа под руководством Александра проанализировала кинематику 15 промышленных роботов. В результате учёные представили ряд рекомендаций, которые помогут промышленному бизнесу выбрать подходящего робота для выполнения конкретной технологической задачи.
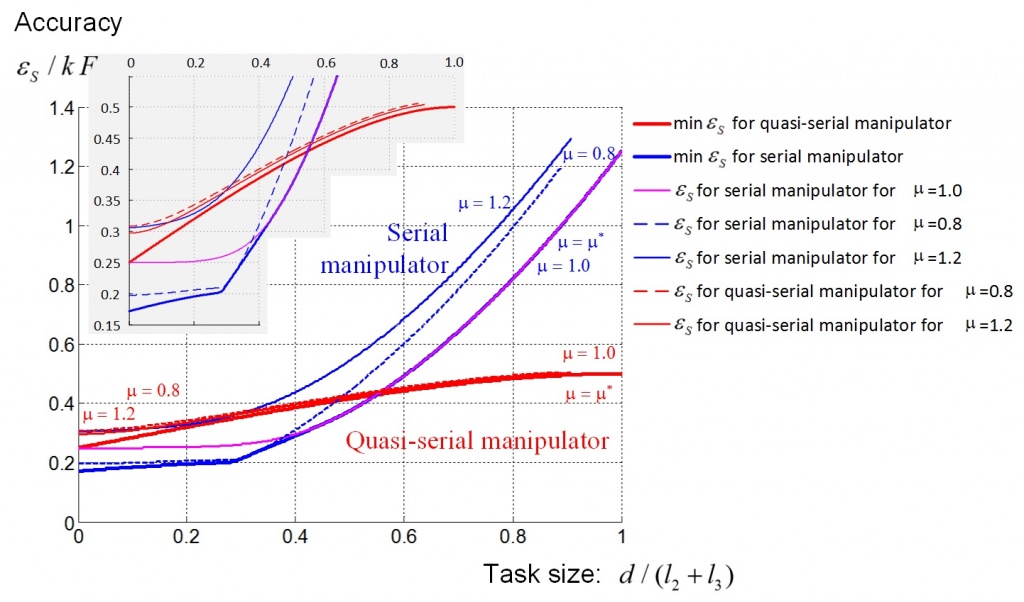 Пределы задач, для которых предпочтительны последовательные манипуляторы и манипуляторы с кинематическими параллелограммами. Отсюда видно, что для малых и средних задач предпочтительны последовательные манипуляторы, а для больших - манипуляторы с кинематическим параллелограммом.
Пределы задач, для которых предпочтительны последовательные манипуляторы и манипуляторы с кинематическими параллелограммами. Отсюда видно, что для малых и средних задач предпочтительны последовательные манипуляторы, а для больших - манипуляторы с кинематическим параллелограммом.
Главный акцент в исследовании сделан не на сборочное производство, а на технологичные операции по механообработке. Полученные результаты позволяют выбрать оптимальные робототехнические комплексы в зависимости от величины обрабатываемой поверхности. Например, если нужно обрабатывать малые площади, то предпочтение следует отдать последовательному роботу, а если размер обрабатываемой детали достигает половины рабочего пространства, то в этом случае роботы с кинематическими параллелограммами — приоритетный вариант.
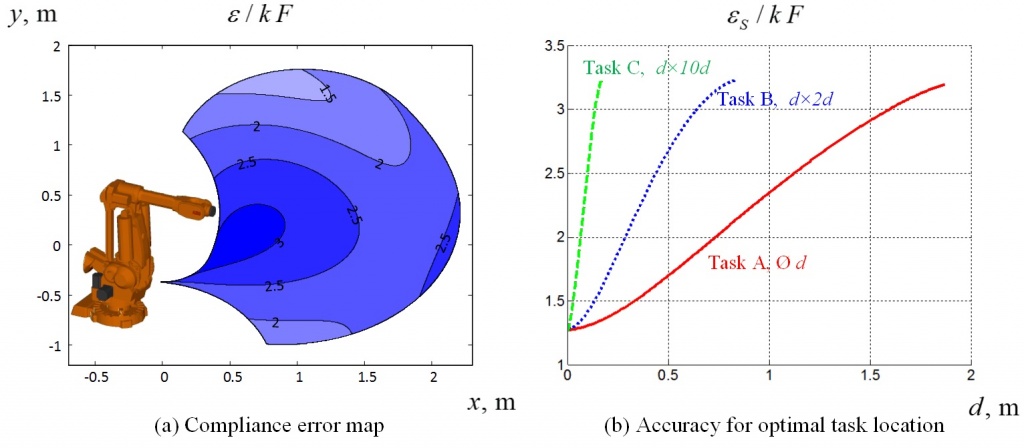 Распределение ошибок податливости в рабочем пространстве промышленного робота от ABB. Справа указана точность, какую может обеспечить робот при выполнении разного типа задач. Все приведённые результаты нормированы и могут быть масштабированы для разной величины внешней силы, приложенной к роботу.
Распределение ошибок податливости в рабочем пространстве промышленного робота от ABB. Справа указана точность, какую может обеспечить робот при выполнении разного типа задач. Все приведённые результаты нормированы и могут быть масштабированы для разной величины внешней силы, приложенной к роботу.
Сотрудниками Университета Иннополис разработаны алгоритмы для оптимального расположения техпроцесса в рабочей зоне и даны предметные рекомендации для рассмотренных роботов.
Публикация в рамках конференции ICMSC 2016 стала первой в серии материалов по данной работе. Другой фрагмент принят к представлению на международной конференции IFToMM Symposium on Robot Design, Dynamics and Control, которая пройдёт в Италии. Подробные результаты работы опубликуют в журнале Mechanisms and Machine Theory.
Роботы и гольф
Развитие технологий автономного транспорта — приоритетное направление для гигантских ИТ-компаний и автомобилестроительных холдингов, таких как Google, BMW, Nissan или Tesla и др. Беспилотные автомобили, грузовики, корабли, дроны и самолёты уже сейчас общаются друг с другом. Они координируют и оптимизируют доставку людей и товаров, в разы сокращая потребление ископаемых ресурсов, увеличивая безопасность дорожного движения.
Над автономным транспортом работают и сотрудники Университета Иннополис. Научный сотрудник ИТ-вуза Илья Шимчик выступил с докладом «Разработка прототипа и моделирование машины для гольфа с помощью операционной системы для роботов (ROS) и среды моделирования Gazebo». В работе представлен метод разработки автономного гольф-кара, предназначенный для частного использования на территории, к которой нет доступа у обычных транспортных средств. В работе над проектом учёные создали виртуальную симуляцию автомобиля и модель мира в среде Gazebo.

«Для проверки модели и алгоритмов мы реализовали навигацию модели гольф-кара от одной лунки для гольфа к другой. Для проверки алгоритмов на практике мы разработали малогабаритный прототип автомобиля, основанный на радиоуправляемой модели автомобиля, которую мы оснастили бортовым контроллером и датчиками», — рассказал автор проекта Илья Шимчик.
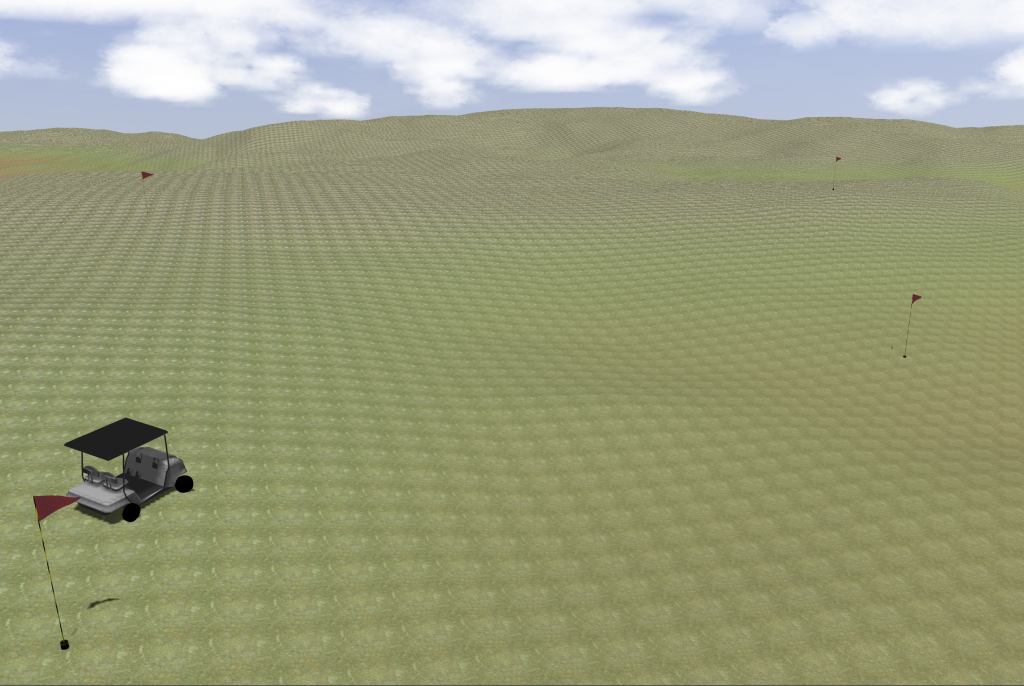 Моделирование машины для гольфа с помощью операционной системы для роботов (ROS) и среды моделирования Gazebo
Моделирование машины для гольфа с помощью операционной системы для роботов (ROS) и среды моделирования Gazebo
Эти исследования проводятся сотрудниками Университета Иннополис в рамках проекта «Локализация, картографирование и поиск пути для беспилотного наземного робота (БНР) при помощи группы беспилотных летательных аппаратов (БПЛА) с использованием активного коллективного технического зрения и планированием в общем доверительном пространстве группы роботов» при поддержке Российского Фонда Фундаментальных Исследований.
Роботы и безопасность
Серьезная задача робототехники — создание роботов повышенной проходимости для выполнения работ в тяжелых и опасных для человека условиях. Например, пройти по зоне отчуждения атомных катастроф для проведения исследований в реакторе энергоблока.

Третьей работой, которая получила приз «Лучшая презентация» форума ICMSC 2016 стало исследование, представленное младшим научным сотрудником Университета Иннополис Рамилем Хусаиновым. Статья «Моделирование динамически стабильной походки робота AR-601M в среде моделирования Simulink» познакомила участников конференции с процессом разработки и исследования комплекса программных решений по созданию энергоэкономичных систем управления механикой движения антропоморфных роботов. В основе работы лежит исследование контроля статического и динамического равновесий, которые помогут роботам совершать многочасовые пешие прогулки для выполнения поставленных задач.

Международная конференция по машиностроению, системотехнике и системам автоматического управления (International Conference on Mechanical, System and Control Engineering, ICMSC 2016) прошла в Москве при поддержке университета аэронавтики Эмбри Риддл, МГТУ им. Н.Э. Баумана и Научно-инженерного института.


